Фото: Скриншот видео пользователя jobert2kx via You Tube
О созданиии микромеханического летающего насекомого инженеры мечтали давно. Воплотить эту мечту в жизнь удалось теперь гарвардским роботостроителям.
Давняя мечта всех роботостроителей - создать микромеханическое насекомое, способное летать, - наконец-то осуществилась. Правда, изделие американских инженеров, представленное теперь в журнале Science и названное RoboBee, то есть "робот-пчела", пока заметно уступает живому прототипу в подвижности и маневренности, а кроме того, не является в полной мере автономным, но лиха беда начало.
Над этим миниатюрным летающим аппаратом группа специалистов факультета инженерных и прикладных наук Гарвардского университета работала более 12 лет. На сайте группы и в YouTube выложено видео, запечатлевшее некоторые из фигур пока, правда, отнюдь не высшего пилотажа первого в мире искусственного летающего насекомого: вот оно отрывается от поверхности лабораторного стола и зависает в воздухе, а вот, повинуясь управляющим командам оператора, плавно смещается вбок - сначала в одну сторону, потом в другую…
Скопировали муху, а назвали пчелой
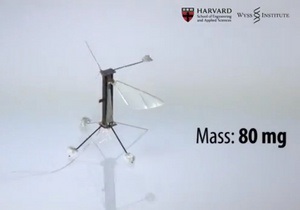
Миниробот изготовлен из сверхлегкого углепластика, поэтому его масса - всего 80 миллиграммов. Размах крыльев - 3 сантиметра. Несколько смущает то, что, назвав свое изделие роботом-пчелой, гарвардские инженеры проявили просто поразительное невежество в области энтомологии: дело в том, что у пчелы как представителя отряда перепончатокрылых - две пары крыльев, а у летающего миниробота всего два крыла, так что его гораздо уместнее было бы именовать комаром, мухой или каким-то иным представителем отряда двукрылых.
Ну да ладно, дело все же не в названии. "У него одна пара крыльев, очень похожих на крылья мухи, - говорит Сойер Фуллер (Sawyer Fuller), один из разработчиков микромеханического шедевра. - Они приводятся в движение миниатюрными пьезоэлектрическими моторчиками - это тончайшие полоски из специального пьезокерамического материала, мгновенно растягивающиеся и сжимающиеся под воздействием электрического тока. Такие двигатели обеспечивают частоту биения крыльев миниробота до 120 герц, то есть до 120 раз в секунду. Причем каждым из крыльев мы можем управлять независимо от другого".
Голлум в гарвардской лаборатории
Специальная высокоточная микромеханическая лазерная установка вырезает из листового материала компоненты корпуса миниробота, их монтаж производится под микроскопом. Немало сложностей гарвардским инженерам пришлось преодолеть и при разработке управляющей электроники, призванной обеспечить стабильный полет рукотворного насекомого.
"На самом минироботе имеются маленькие белые крапинки - это опорные точки, отслеживаемые камерами, что позволяет точно определять положение робота в пространстве. В принципе это та же самая технология, что широко применяется в кино. Скажем, при съемке "Властелина колец" на актеров наклеивали катафотные отражатели, движения светящихся точек регистрировались камерами, и потом по ним компьютерная программа весьма реалистично создавала разных анимационных персонажей вроде Голлума. Мы же используем эту технологию, чтобы отслеживать биение крыльев нашего робота. Компьютер анализирует поступающие данные и выдает управляющие команды".
Ни микропроцессора, ни миникамер, ни минибатарейки
Эти команды робот получает по тончайшему кабелю. Кабель напоминает нитку и ни в коей мере не ограничивает подвижность летательного аппарата, который способен перемещаться со скоростью до 40 сантиметров в секунду и обладает довольно значительной устойчивостью.
Однако главная цель гарвардских умельцев состоит в создании автономного летающего миниробота, который управлялся бы не внешним компьютером на основе информации от внешних же камер, а собственным миниатюрным микропроцессором на основе данных от собственных крошечных камер. Пока же робот даже необходимую для полета энергию получает по тому же самому кабелю: инженерам не удалось найти достаточно мощный источник питания со столь малой массой, чтобы его можно было разместить непосредственно на минироботе.
Самая насущная задача - совершенствование микромеханики
Между тем, для автономного миниробота уже имеется конкретное применение, говорит Сойер Фуллер: "Деньги нам были выделены на разработку робота-пчелы. Во многих странах мира в последние годы отмечена загадочная массовая гибель пчел, а ведь эти насекомые играют чрезвычайно важную роль в опылении сельскохозяйственных культур. Возможно, со временем эту функцию возьмут на себя летающие минироботы".
Если же оснастить эти минидроны соответствующими датчиками, они могут найти применение и в военной разведке, и в гражданских службах спасения, и в системах управления дорожным движением или экологического мониторинга. Но пока об этом думать рано. Для начала инженерам предстоит обучить свое изделие искусству мягкой посадки, потому что сегодня оно просто плюхается вниз, как только перестает махать крыльями. Таким образом, самая насущная задача, стоящая перед гарвардскими роботостроителями, - совершенствование микромеханики и повышение маневренности летающего миниробота.
Источник: Русская служба DW